The R/C (Remote Control) Servo's
... and what they do!
Remote control (R/C) servo's (servomotors) take a varying width digital pulse signal (pulse width modulated) from a remote control or radio control (R/C) receiver, internal electronics detects the width of the signal pulse and use it to proportionally operate the rotation angle of an external disk or lever, called a "horn". This lever then usually pushes or pulls a rod to operate steering or aileron movements in almost real time based on the R/C transmitter "stick" position. Digital and analog servo's work the same way, they just use different techniques internally to improve the signal to position accuracy. Servo's vary enormously in size, speed and operating force as well as having a large variety of durability factors such as gear materials and bearing types. A most annoying feature is the range of different connector types, which may mean they don't always fit your receiver!
How They Work
The Servo's convert a digital control signal from a particular receiver channel and some power supply energy into physical work by rotating an output shaft through 0 - 90 degrees, or -45 - 0 - +45 degrees if the the transmitter has a return to center stick movement. The output shaft then usually operates a lever called a "horn", the energy for this work comes either from a separate R/C receiver battery or a BEC (Battery Eliminator Circuit) in a speed controller connected to one of the receiver channels. The amount of work that the servo is asked to perform determines the amount of current they will draw from the battery or BEC. The standard measure of this work or force is the "torque" which is required to move or push whatever the servo is trying to operate, which in turn is usually trying to counteract and push back against the servo force.
Take the case of a rudder on a boat that is moving at speed, when the boat is moving in a straight line the amount of energy required from the servo is almost nothing as the force of the water rushing past is already trying to push the rudder to the center position anyway but once the servo is asked to turn the rudder in order to turn the boat, the force of the water rushing past tries to push it back to the straight ahead position, therefore the amount of torque required from the servo in this scenario is based on the mass of the boat, the speed and the turning angle. In a servo specification the torque capability is usually specified as Newton centimetres (Ncm) or Kilogram centimetres (kg.cm) or ounce inches (oz.in). The speed with which the servo is able to turn the Horn is usually specified as a time in seconds or milliseconds to turn 60 degrees, note though that if the servo is under powered for a particular application or the receiver battery or BEC circuit is lacking in current capability it may take longer than it should to rotate.
Servo's have three connecting wires that are grouped in a small three pin connector (which can vary based on the brand).
1. Ground or negative supply: - usually black or brown
2. Positive Supply Voltage (PSU): - usually red or orange
3. Control Signal: - usually yellow or orange
The servo's D.C. power is supplied via the channel connectors on the R/C receiver and it will be nominally +5Volts.
The operating voltage is usually somewhere around +4.8Volts to +7.5Volts but most modern servo's have voltage regulators built inside which makes the rotation angle accurate under it's full range of working voltages.
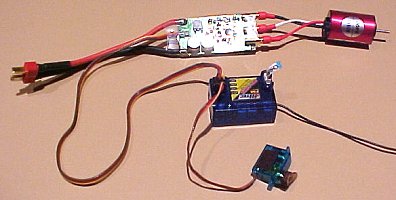
From Top to Bottom - Brushless speed controller (and motor), receiver, servo.
In this setup the battery supplies power to the speed controller, at whatever voltage the battery is, the speed controller has a BEC circuit which regulates the voltage to +5V and supplies power to the receiver and then the receiver supplies power to the servo. Bear in mind that receivers get power from any channel, they don't usually care, so the positive supply voltage pin on any channel can be seen as a supply input or output and this may cause an issue if you have more than one speed controller with a BEC circuit.
What the Receiver Control Signal looks like
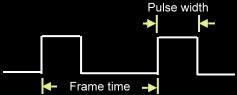
The Frame time (or pulse rate): 16 - 23milliSeconds
The Pulse width range: Min: 0.7milliSeconds - Max: 2.3milliSeconds
note: exceeding these values may cause the servo to jitter or to run slowly.
The pulse height from the receiver is nominally +5Volts (I have seen lower), the servo usually detects the change in voltage at around TTL levels or 1.2Volts and a good servo will have some hysteresis which serves to clean up noisy signals.
Horn position (rotation angle)
The relationship between the incoming pulse width and lever or horn position is as follows:
|
Pulse Width Signal |
Horn position |
|
0.7-0.8 ms |
Safety zone for CW |
|
0.8 ms |
+90 degrees |
|
1.15 ms |
+45 degree(H position) |
|
1.5 ms |
0 degree(center position) |
|
1.85 ms |
-45 degrees(V position) |
|
2.2 ms |
-90 degrees |
|
2.2-2.3 ms |
Safety zone for CCW |
Internally a typical servo consists of (1) a small fast motor, (2) a set of gears which convert fast but weak motor force into a much slower but much more powerful output shaft torque and (3) some electronics which measures the control signal pulse width and compares it to the output shaft position.
In more technical detail: In an Analog servo the input pulse signal from the receiver is usually integrated, using a charge time ramp, into an "input" voltage level so that a short pulse generates a lower input voltage and a long pulse generates a higher input voltage. On the output shaft there is usually an analog potentiometer across a supply voltage such that it's physical rotational position generates an "output" voltage ranging from low to high. As the input pulse width from the receiver is varied from it's previous width (by varying the transmitter stick position), the integration voltage will vary. This "input" voltage is continuously compared to the potentiometers "output" voltage and an error signal is generated if they are not the same, which operates an error amplifier and a driver circuit for the motor and causes it to spin in a particular direction, operating the gear train and rotating the output shaft somewhat slowly until the voltages again become equal. If the input pulse width gets shorter the servo will turn one way and if the pulse width gets longer the servo will turn the other way.
If the output shaft is rotated by an applied mechanical force, while the input pulse width remains steady or unchanged, the potentiometer will move and this will generate an error signal which will cause the motor to spin and force the output shaft back to its previous steady position. This assumes of course that the servo has enough torque to counteract this externally applied mechanical force.
In a digital servo the same techniques are used, except that instead of an analog charge time ramp, the input signal pulse width is digitally measured for its time duration and then usually converted into one of 256 or 512 rotation positions. The error amplifier and motor control may also be implemented digitally.
Mounting the servo
Always try to use some sort of flexible mounting, which is usually supplied with larger style servos but not generally supplied with the smaller styles. The forces available can pull your model to pieces if for instance the horn positioning or direction of travel is wrong. There is no standard servo rotation direction compared to transmitter stick movements so they can be opposite to a replaced servo, although most transmitters have a reversal switch to adjust this problem, you usually find out after the servo is mounted in a tight inaccessible spot.
How do I decide which servo is for me
The amount of torque required is the best way of determining the size and capacity of the correct servo and you may also need a particular speed as well. Many applications are restricted in size and many people are severely restricted by budget so what you need and what you buy may be quite different. For power and endurance try to use the largest style that will fit and you may need a version with good output shaft bearings as well as metal or high quality plastic gears. Most servo styles have a range of options or models but bear in mind that many economy servos have no "real" bearings and just use the plastic housing and the potentiometer as the only bearings on the output shaft.
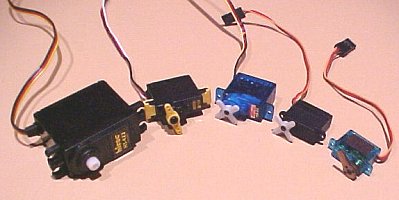
A Range of Servo sizes that I have used - this is not an exhaustive list by any means.
I am not endorsing any particular brands but I have used all of these with good to excellent results.
Not all servos give a full 90 degrees of rotation with a typical transmitter stick movement.
Hitec HS422
Standard size servo from Hitec
The HS-422 is one
of the most durable and reliable servos Hitec has ever offered. It has dual
iron-oilite bushings, high impact resin gear train and high performance
circuitry, the HS-422 features excellent centering and resolution.

Specification
Dimensions (mm) 20.0 x 41.0 x 37.0
Weight (grams): 45.5
Speed (sec): 0.21
Torque (Kg.cm): 3.30
Bearing: Oilite bush
There are many brands and choices of specification in this standard size category
--------------------------
Hitec HS-55
Feather servo

Specification
Dimensions (mm) 12.0 x 23.0 x 24.0
Weight (grams): 8.0
Speed (sec): 0.17
Torque (Kg.cm): 1.10
Bearing: plastic
---------------------------------
Protech B109
Micro Servo from Protech

Specification
Dimensions (mm) 9.0 x 27.0 x 24.0
Weight (grams): 9.0
Speed (sec): 0.16
Torque (Kg.cm): 1.50
Bearing: Plastic
Protech B1049
Micro Servo from Protech

Specification
Dimensions (mm) 8.0 x 20.0 x 16.2
Weight (grams): 4.9
Speed (sec): 0.10
Torque (Kg.cm): 1.50
Bearing: Plastic
Park Flyer R/C PFS-04M
Pico Servo

Specification
Dimensions (mm) 7.5 x 19.0 x 15.7
Weight: 4.4grams (0.15oz)
Speed (sec/60deg): 0.12
Torque (Kg.cm): 1.0
Bearing: Brass
This particular model is the metal geared and brass bearing version, it is also available as a lower cost PFS-04
These are made in Korea and are sold as various brands.
Also sold as Saturn S44 and a very similar unit is also available - the SuperTec Titch44